人工智能课程介绍
北京师范大学智慧学习研究院
智慧学习研究院(Smart Learning Institute)是北京师范大学下设的综合性科学研究、技术开发和教育教学实验平台。主要任务包括:在重点产品开发及项目研究的关键环节上取得实质性突破,形成可大规模推广的智慧学习解决方案;建构智慧学习理论,探索信息技术与教育双向融合的方法与途径,形成一批具有国际影响的学术成果;建立智慧学习实验区和实验校,发展基于大数据的教育教学研究模式;通过双聘机制和企业导师制,探索产学研结合的教育信息化高端人才培养机制。
青少年人工智能创新计划—元卓计划
元卓计划由北京师范大学发起,旨在培养青少年利用原创算法解决真实问题的能力,建立产学研协同机制,推动人工智能企业科技成果向教育教学转化,助力我国成为世界主要人工智能创新中心。
概述
本项目包含一个在线文档以及配套的教学材料(PPT、教案、学习单)。
包含6个有所关联、逐步递进的项目构成的章节。分别涉及物联网、机器人、机器视觉、语音识别和控制等内容。
包含背景知识学习、环境准备和资源下载部分。
本课程通过6个有所关联、逐步递进的章节,探究人工智能的基本原理,了解人工智能、机器学习基本概念,参与计算机视觉、语音技术等人工智能领域相关项目,利用人工智能解决学习和生活中的实际问题。
课程涉及人工智能基本概念、计算机视觉、语音技术、机器人等内容。通过一系列动手实验,制作小车和机器人,完成物体检测、自动追踪、无人驾驶、机器人姿态模仿、语音助手等项目。
课程包含详细的在线操作文档、配套代码、小车及机器人3D打印零件及全部硬件器材,学生无需自行准备任何设备,即可顺利完成全部项目。
完成课程学习后,将会对人工智能的基本概念有一定了解;对图像分类,目标检测,自然语言处理、语音识别等技术有直观体会;掌握开源硬件的基本操作,并通过开源硬件构建人工智能应用。
基于本项目的内容,通过调整章节比例和难度,我们制作了分别面向小学高年级、初中、高中及以上三套课程。每套课程均为16课时。
分章节介绍
第1章 基础知识
- 介绍: 学习者通过学习本章内容,将熟悉掌握一些必备的相关技能。如Python基础,Linux常见命令操作,开源硬件的基础操作等。为后续的项目学习打好基础。

第2章 人工智能体验
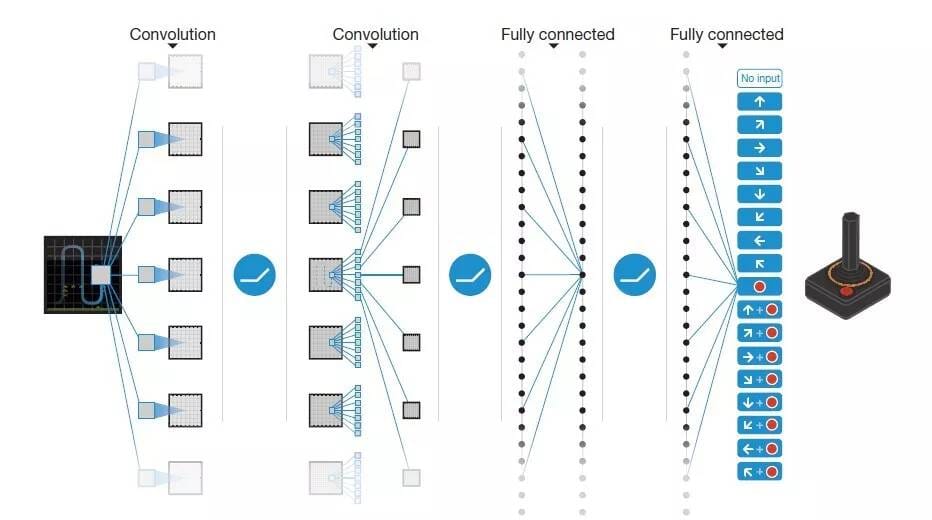
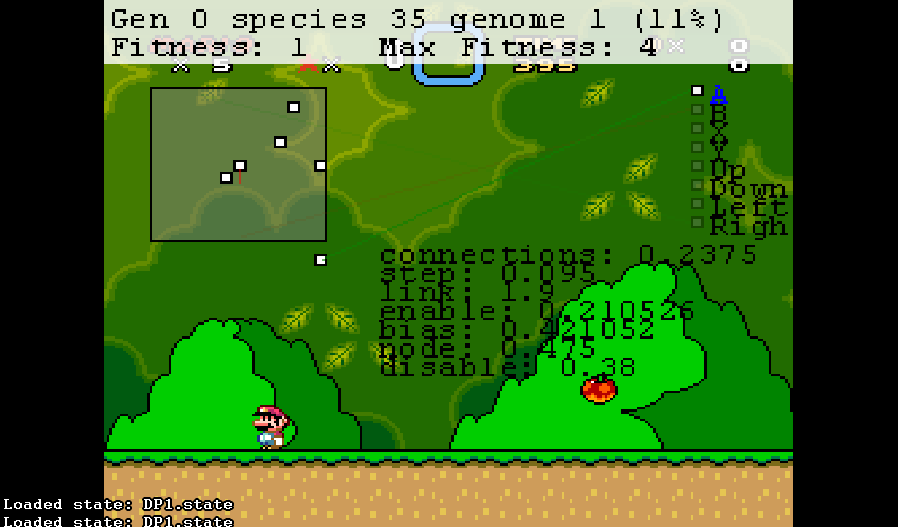
- 介绍: 通过本章内容,学生对人工智能的数学基础、概率论和博弈论、人工智能在图形图像和语言处理、电子游戏及其他领域的应用有感性认识。
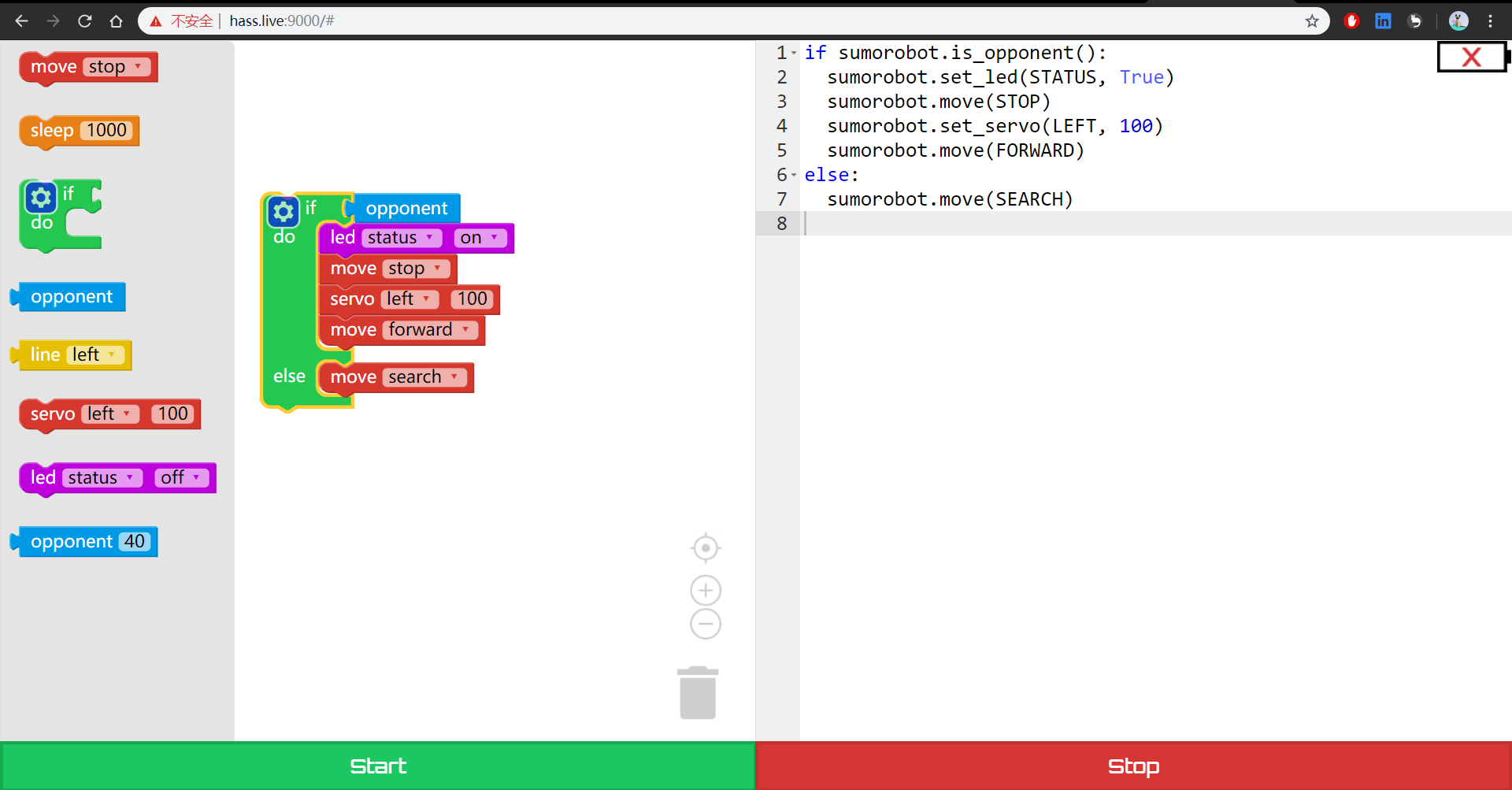
使用在线的积木编程(google blockly/scratch)来控制

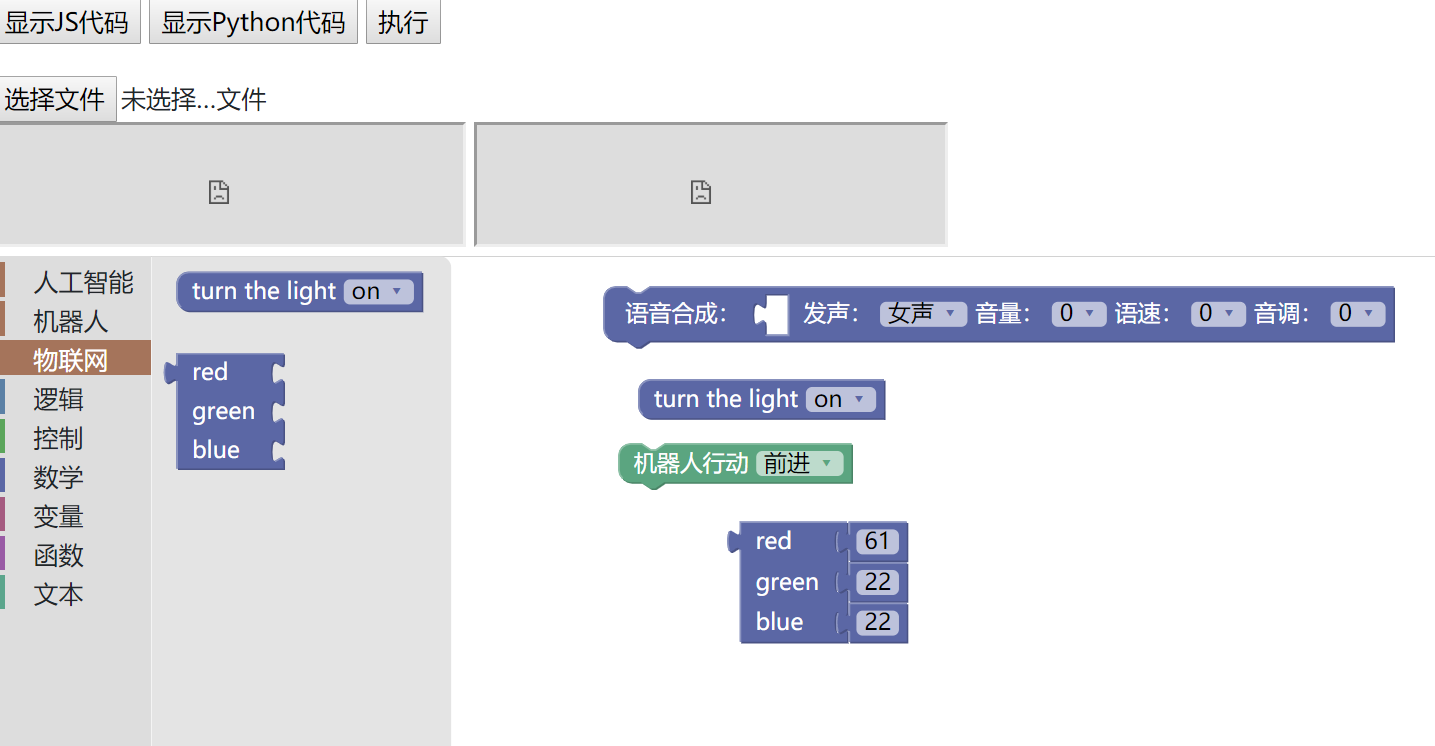
- 涉及软硬件: PC或树莓派(Raspberry Pi)或NVIDIA Jetson Nano
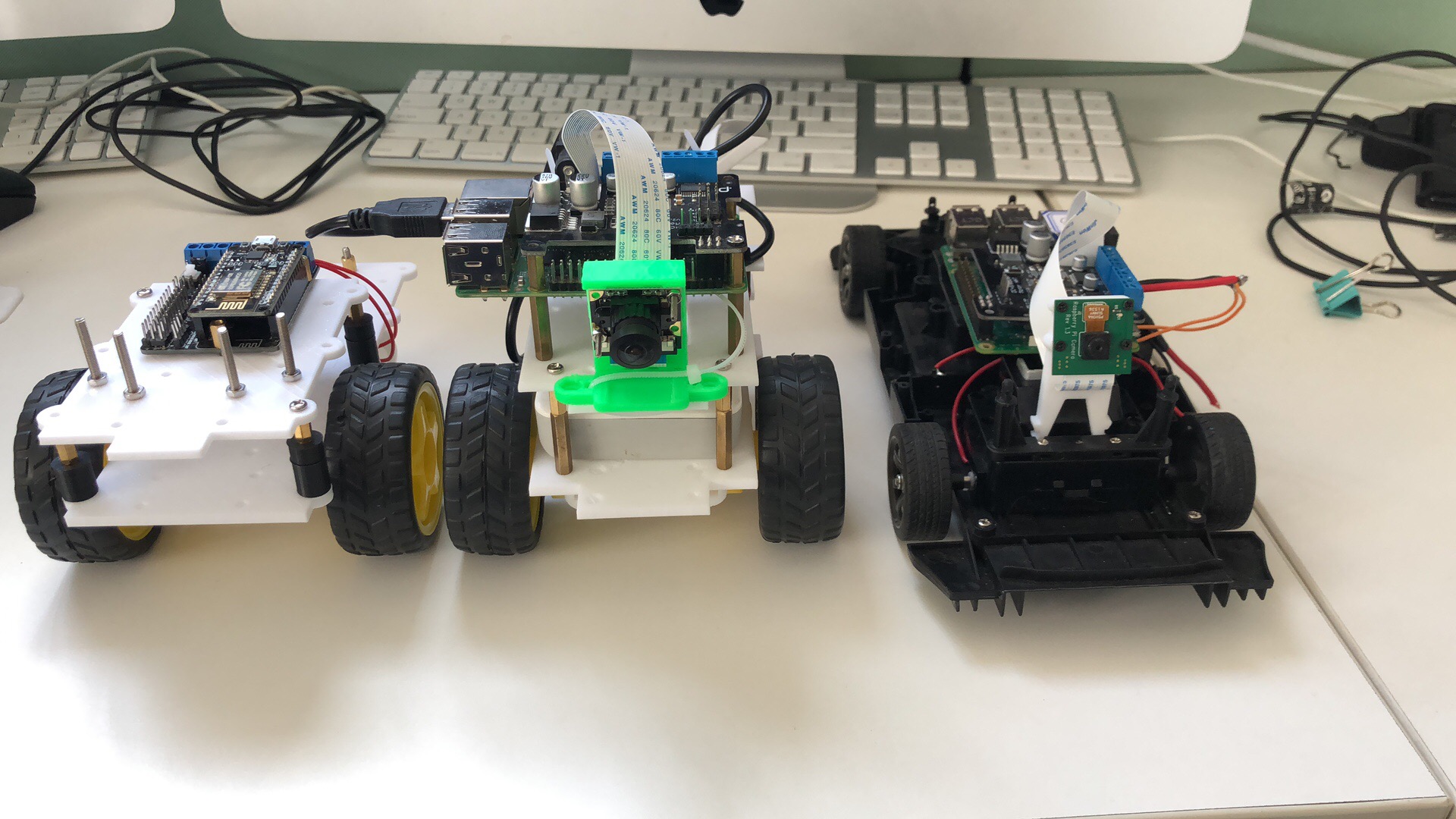
第3章 智能车“小白”
- 介绍:
主要使用ESP8266提供Web服务,来控制电机、舵机、传感器等,实现远程遥控、远程视频监控、巡线、避障、控制机械臂抓取等功能
可以通过积木编程的方式来对小车的功能进行编程

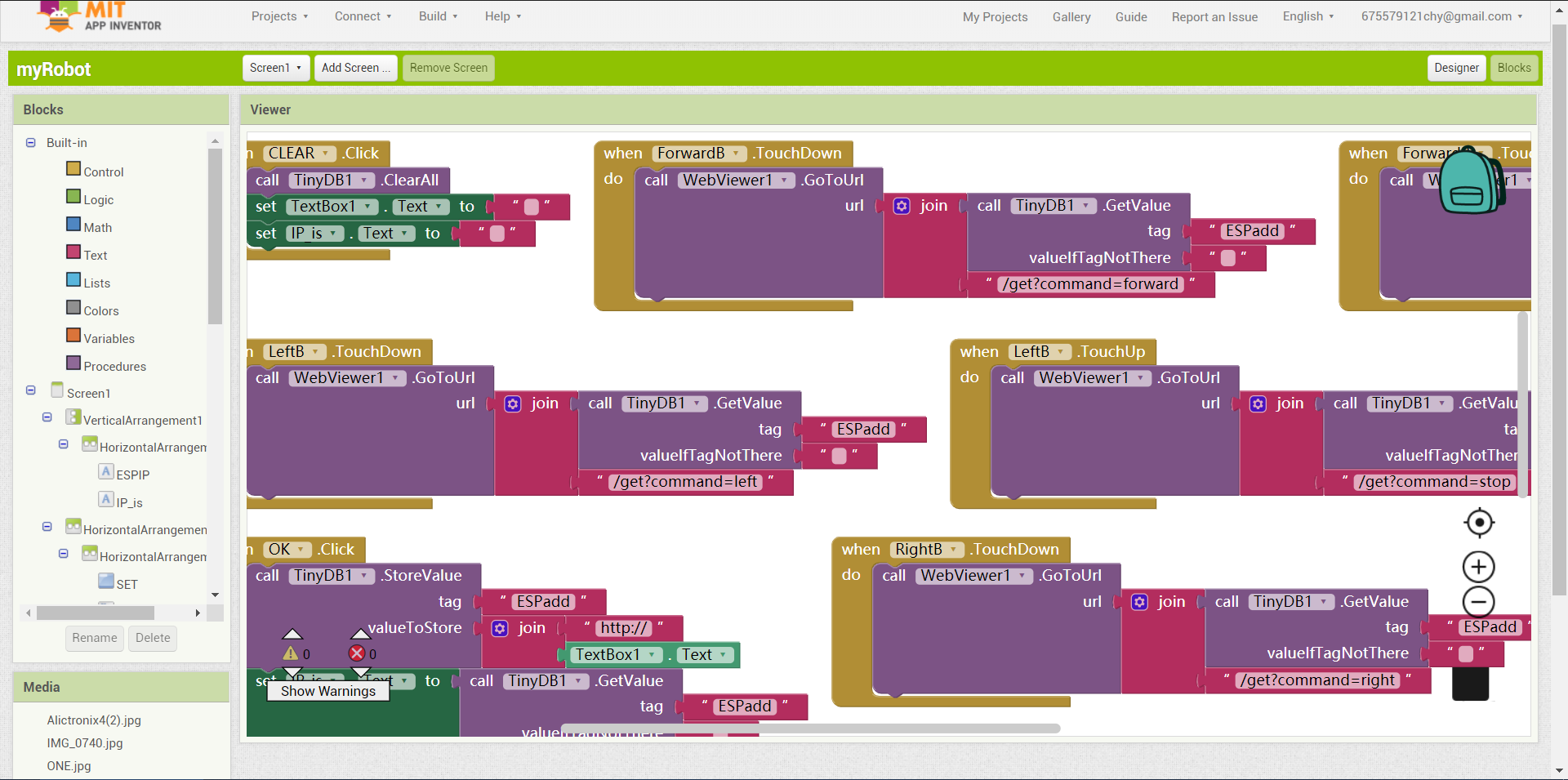
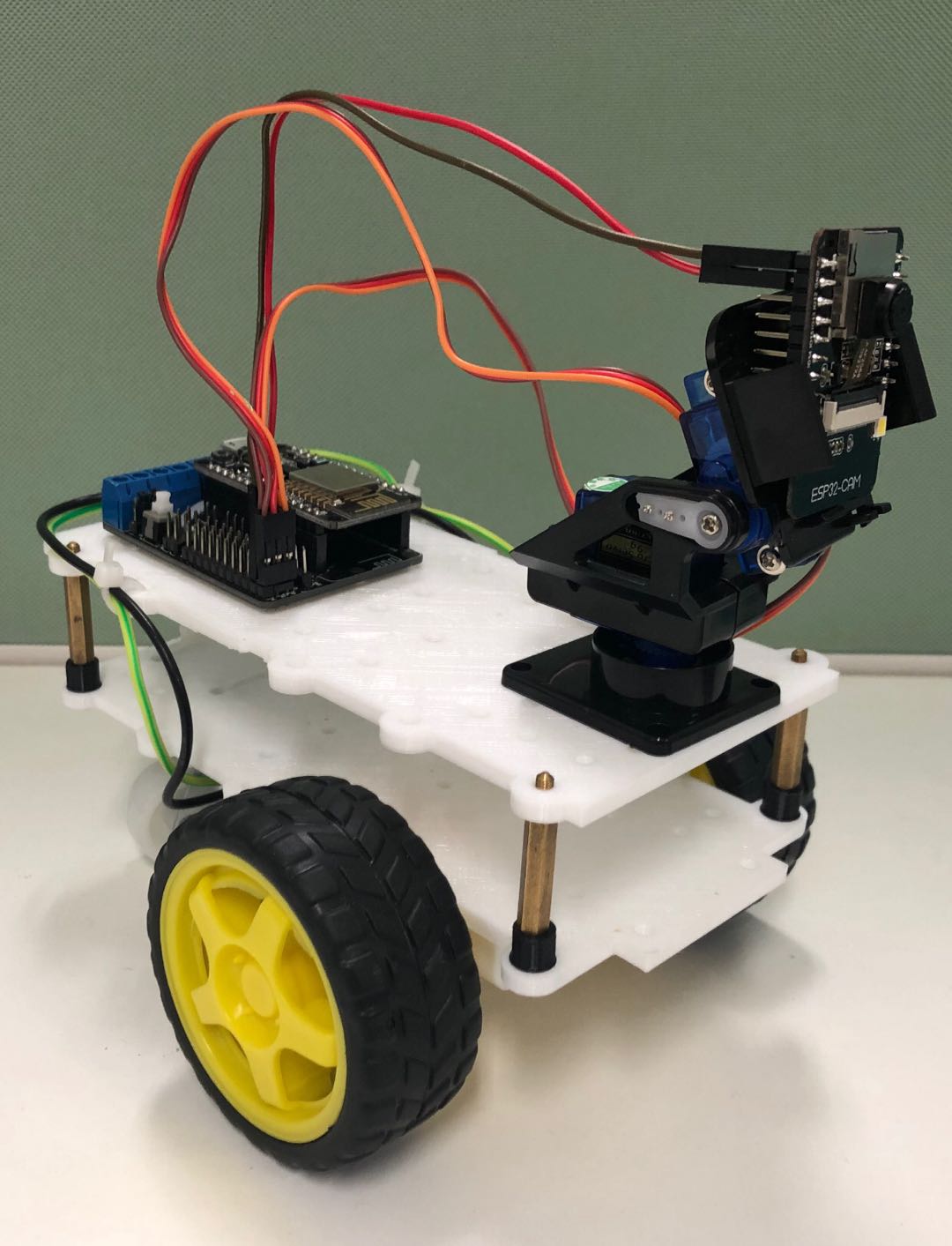

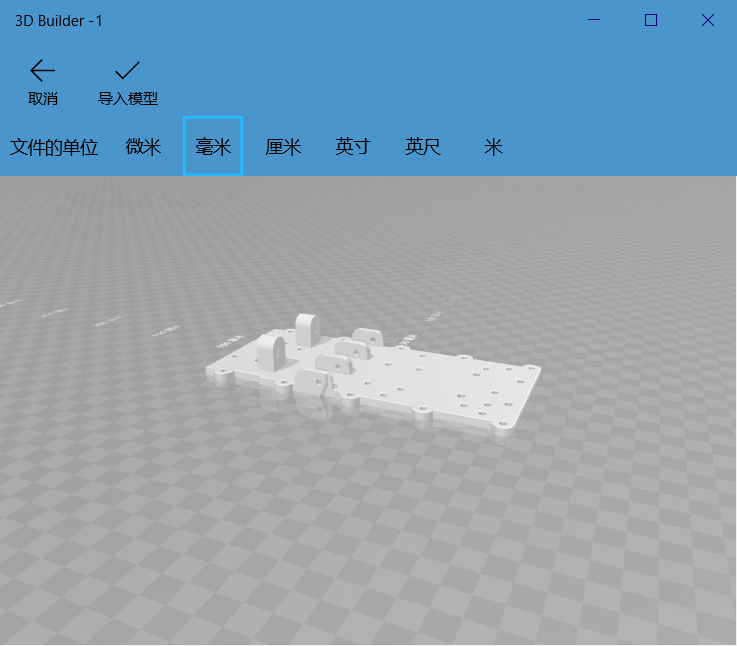
- 涉及软硬件: ESP8266,ESP32-CAM,小车套件(可3D打印),舵机,灰度传感器、超声波传感器等 自行开发的物联网控制平台,MIT App Inventor
第4章 自动追踪小车“大白”
- 介绍:
从机器视觉出发,让学生理解机器视觉的相关概念和原理,辨别OpenCV和深度学习的异同点。
使用OpenCV来处理视觉信号,并通过蓝牙或串口来将处理过的视觉信号发送给小车,从而实现物体追踪,人脸追踪,智能机械臂抓取等功能
学生通过使用Python,完成信息采集:爬虫、多文件处理;信息处理:训练采集的数据,形成分类器,从而让计算机视觉系统能够对特定的物体进行分辨

- 涉及软硬件: 树莓派、Arduino、舵机、USB摄像头、小车套件、3D打印机、电磁传感器、蓝牙接收器 OpenCV、Python
第5章 无人驾驶小车“老白”
- 介绍:
采用深度学习的方式,通过采集无人驾驶的数据,并进行训练,来实现无人驾驶的功能


- 涉及软硬件: 树莓派、摄像头、小车套件 Python
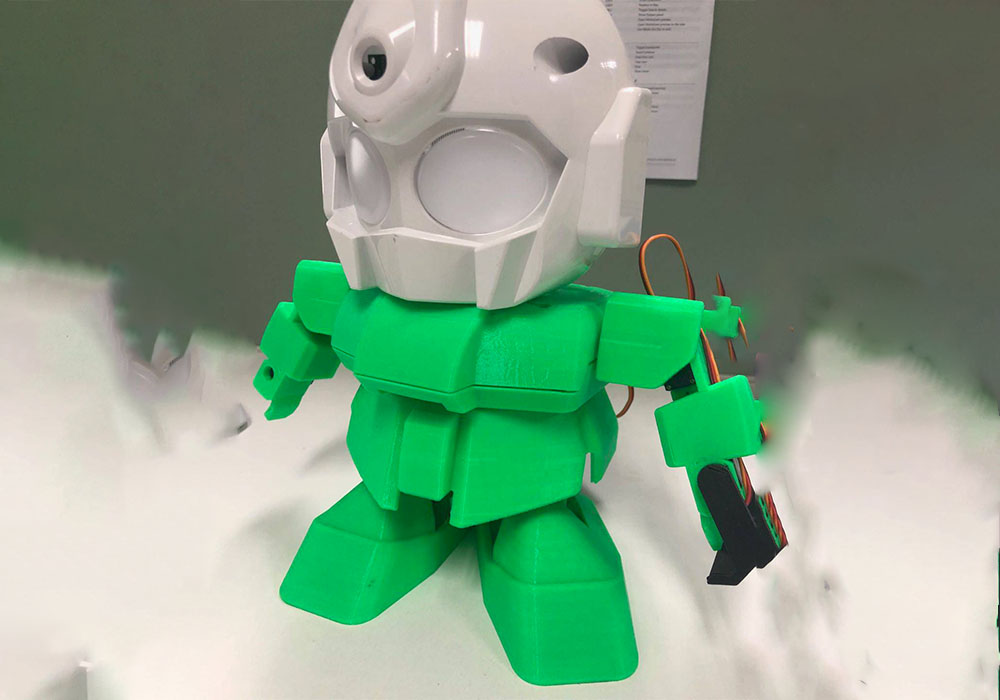
第6章 机器人“小绿”
- 介绍:
组装一个机器人,作为物联网的一个节点,实现多种物联网功能,包括网页遥控:通过自行开发的物联网平台来对它进行遥控;语音助手:可以通过自己训练的热词来进行唤醒、通过语音来控制机器人执行各种动作;控制其他设备:比如控制前几个章节的小车,读取各种传感器的数据等;人脸解锁:通过实时的人脸识别和红外线发射装置,实现人脸解锁,也可以通过Google Assistant、Siri、Alexa等远程控制;实时姿态模仿:通过单目摄像头拍摄实时画面,采用OpenPose姿态识别软件进行处理,将关节姿态数据通过蓝牙或串口传递给机器人,机器人进行实时的姿态模仿。

- 涉及软硬件: 树莓派、ESP8266、麦克风阵列、舵机、3D打印机、摄像头等