第5章 深度学习—无人驾驶小车老白
本章主题:深度学习、无人驾驶
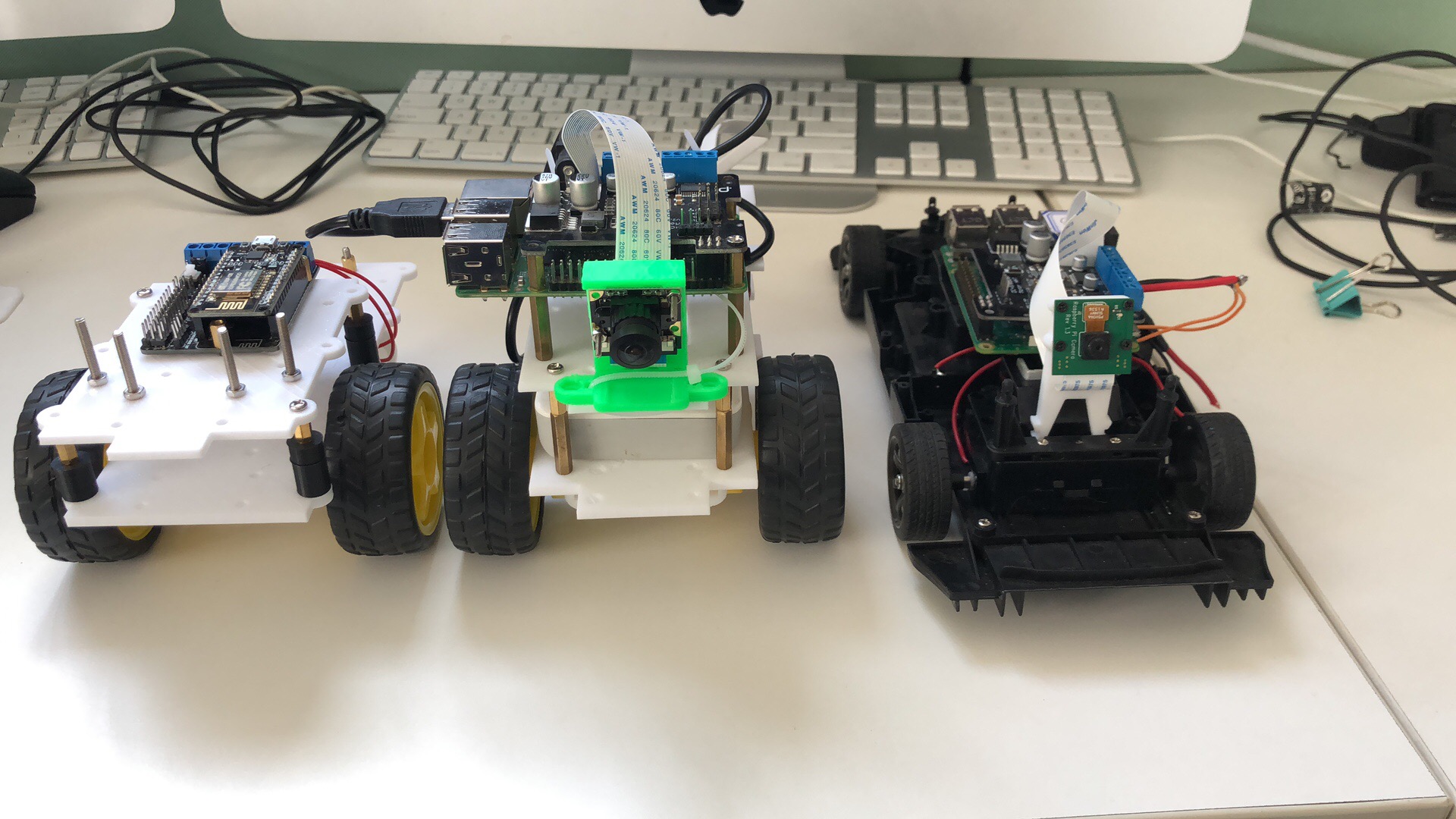
这部分基于树莓派以及一些开源软件构建。树莓派从摄像头模块获取输入,然后通过无线方式发送获得的图像数据到电脑,电脑通过之前训练好的神经网络对输入的图像数据预测小车接下来的动作,然后发送这些预测动作的控制指令到树莓派控制小车的程序中。小车根据这些获得的指令实现自动驾驶。
现有的Caffe、TensorFlow等工具箱已经很好地实现CNN模型,但这些工具箱需要的硬件资源比较多,不利于初学者实践和理解。本章使用NumPy来构建卷积神经网络(Convolutional Neural Network,CNN)模型,通过对驾驶数据的采集和训练,实现无人驾驶。
本章重点
- 掌握无人驾驶数据采集及训练的基本方法
- 会灵活地在无人驾驶系统中训练和应用分类器
涉及软硬件
- 树莓派、摄像头
- 小车套件
- OpenCV