
为迎接即将到来的全国科技工作者日,庆祝中国人工智能学会成立40周年。由中国人工智能学会主办、CAAI认知系统与信息处理专委会承办的“机器人智能”论坛第十一期于5月24日成功举办,多平台直播在线观众超26万人次。本期论坛邀请了中国科学技术大学陈小平教授、日本大阪大学万伟伟教授、东南大学王炳昊研究员和意大利米兰理工大学苏航博士一起分享最新的最新理论和技术成果。

智能机器人的深层挑战 AI建模-决策与(非)封闭性
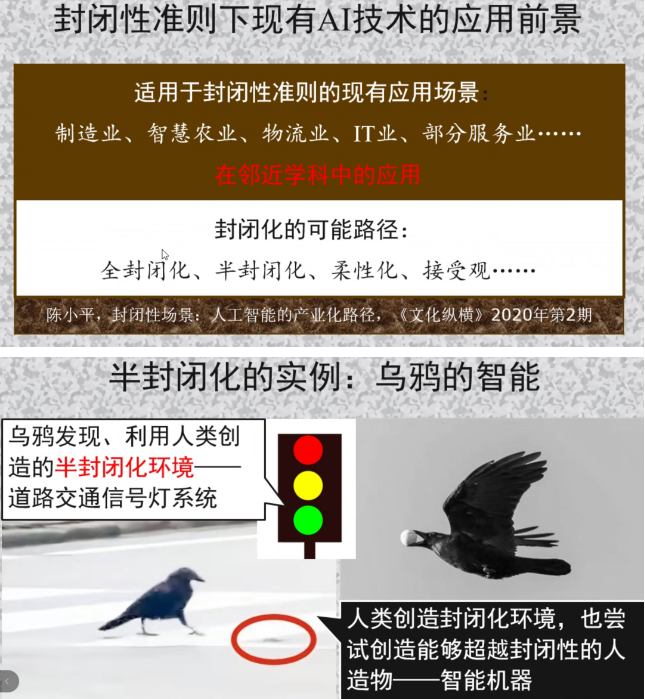
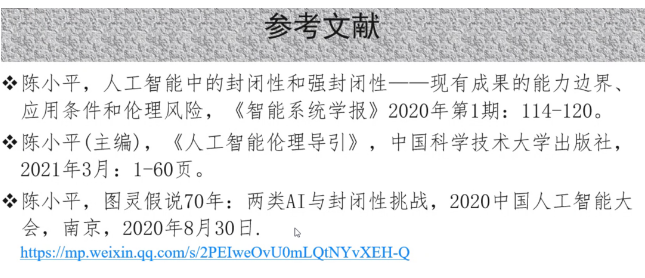
首先陈小平教授分享了“智能机器人的深层挑战:AI建模-决策与(非)封闭性”的报告。报告按照“智能机器人和AI的科学内涵”、“现有AI核心技术及其集成”、“现有AI技术应用条件-封闭性”和“超越封闭性:开放知识和融差性”四个部分展开。陈教授详细解释了智能机器人的内涵,包括:机器人有智能;环境变化是不可预知,既不能准确建模,也不能精确感知;任务的执行受环境变化影响。并且进一步阐述了思维机器的科学内涵。陈教授又提出了人工智能的三层空间,同时谈及了AI第四次浪潮动向。接着他又解析现有AI技术的封闭性与智能机器人应用场景的非封闭性之间的本质差距,分析封闭性的根本原因,阐述封闭性准则及场景封闭化的若干路径。最后分享了课题组的最新研究成果。

开源机器人仿真控制平台
第二场大阪大学的万伟伟副教授分享了“开源机器人仿真控制平台”的报告。报告介绍开发的一套类似ROS的机器人规划仿真控制平台,重点讲述这套系统中关于混合任务和动作规划的研究成果的集成,以及在这基础上的一系列机器人快速部署的应用。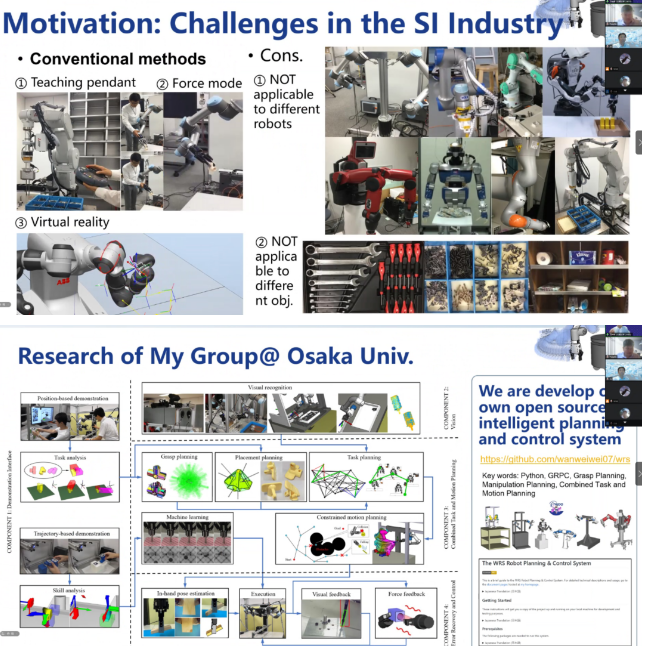
可穿戴电子皮肤与人机界面
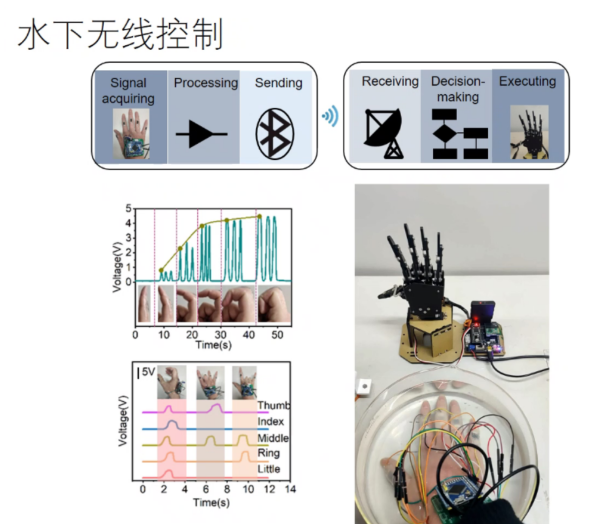
第三个报告由东南大学王炳昊研究员分享。报告重点讲述两个工作进展:1)基于金属氧化物纳米线的可拉伸多功能传感器件,通过高通量吹纺技术制备的纳米线网络,解决了无机材料与可拉伸/可穿戴器件不兼容的难题。基于其的可穿戴器件可检测与人类活动相关的信息,包括气体、紫外线、压力、温度、身体运动和呼气等。并且,单片集成的基于金属氧化物纳米线的传感器系统使人机交互具有多种传感功能和高水平的识别能力。2)报道了防水型可穿戴传感器并演示了机器人手的水下无线远程控制。通过采用有机硅材料原位涂覆激光诱导的石墨烯传感层实现了可拉伸防水传感器件的制备。该可穿戴设备在水下可以连续工作5小时并可以检测应变,温度和压力。通过安装五个传感器阵列,进一步演示了手势的识别与机器手的水下无线远程控制。

冗余机器人在遥操作场景中的应用
最后一场报告由意大利米兰理工大学苏航博士分享。冗余机器人可以通过引入等级控制,用来达到不同其他的目的,如安全增强、远程运动中心、可操作性优化和灵活的人-机器人协作等。特别是对于手术室等遥操作场景来说,冗余机器人得到了广泛的应用。由于物理上的交互作用,遥操作的安全性和准确性可能会受到影响。报告就如何利用冗余度在遥操作场景中的应用进行了详细阐述和深入探讨。
来源: 中国人工智能学会
原文链接: http://caai.cn/index.php?s=/home/article/detail/id/1332.html